

Nearshore oceanographers have long been interested in edge waves that are ubiquitously found on sandy shores; from Huntley, Guza, Thornton (Torrey Pines, early 80s) to Oltman-Shay, Howd (Duck, early 90s) to Sheremet, Noyes, Guza, Feddersen, Elgar (Duck, late 90s) and MacMahan, Reniers (rip channeled beach in Monterey, early 2000s); amongst many others. Edge waves are low-frequency waves that are refractively trapped and propagate up and down the coast with periods of 30 seconds to 5 minutes. Since edge waves propagate along the beach, a coherent (i.e., time-synced) alongshore array is required to measure them. On sandy shores, edge waves are coupled to morphologic features such as beach cusps and rip channels. On sandy shores, Sheremet and Henderson (Duck, the late 90s) pursued the dissipation of edge waves. Will edge waves on rocky shores have similar characteristics to those on sandy shores? Will edge waves dissipate quicker because of the rough bottom? Will edge waves support any coupling to the various rocky shore scales (i.e., rough bottom or the mini headland and embayments)? Pilot studies (the late 2020s) at Hopkins Marine Station show low-frequency signals break within the rocky surf zone, influencing surge channel dynamics and biological recruitment!
On sandy shores, alongshore coherent arrays have generally consisted of instruments cabled across the beach to a common, land-based computer for time syncing. Armored cables were used as they self-buried within the sand. At the onset of experiments, swimmers, wave runners, the CRAB, and boats would pull these cables offshore. After the experiment, the buried cables were removed by large cable pullers and many slow pulls by humans. It was best to pull from the offshore end toward the shore. The long (1km or more) cable distances between the instruments and the land-based computer often required various inline repeaters along the cable to handle the voltage drop of the RS485 or even the analog signals.
Cables cannot be used for all locations. Time-syncing without cables is very challenging. Oltman-Shay (the 2000s) developed a coherent array without cables, requiring precise clocks at each mooring. This was before GPS was commonplace (i.e., much before the iPhone:)! Herbers and Jessen (late 90s), working with a technical group out of Marina, CA, used underwater transponders for time-syncing. Most groups using these self-contained time-syncing gizmos became frustrated and never wanted to touch them again:)!
Instrument technology (memory, onboard processing, and batteries) has dramatically improved over the years, and the norm is to deploy self-logging instruments, which are highly robust. However, the instrument clocks are inaccurate and drift due to cheap electronic oscillators. Clock drifts are further modified by temperature, which is often non-linear and results in about +/-60 seconds/year error. For most experiments, this is good enough, but not for a coherent alongshore array.
On rocky shores, we couldn’t use the standard sandy shore approaches of cabling because rocky bottoms would not allow the cables to bury, and the cable would then move along the bottom in large waves, negatively impacting the ecosystem.
We needed a different mousetrap. Sofar Ocean Technologies (sofarocean.com) makes a Smart Mooring (Figure 1), a Spotter directional wave buoy with a cable connected to an underwater RBR (rbr-global.com) Coda sensor (herein a pressure sensor). At the time, the Smart Mooring setup was mainly used to capitalize on the Spotter’s logging and data transmission capabilities. A modified Smart Mooring was our answer to the coherent array on a rocky shore. The Spotter uses GPS technology to time-sync clocks and time-tag measurements. We asked Sofar Ocean Technologies to improve the time-syncing of their measures, which they believe is accurate to 10 milliseconds (which is outstanding). We deployed 9 Smart Moorings (Figure 2), each connected to bottom-mounted pressure sensors, across 1 km, spanning 4 headlands and 2 embayments. The moorings are lagged to provide various spatial distances. We will use standard oceanographic analysis techniques for estimating frequency-wave number spectra to offer insight into resonant dispersion curves for a rocky shore.
The Smart Moorings provide real-time estimates that allow us to monitor the directional wave spectrum and bottom-mounted pressure (mean and standard deviation, Figure 3). The Smart Moorings have had two cable failures near the pressure sensor owing to the rough bottom; both required replacements. Because we are receiving data in real time, we can recognize equipment issues and fix the moorings within a day to avoid data loss during the experiment.

Figure 1

Figure 2
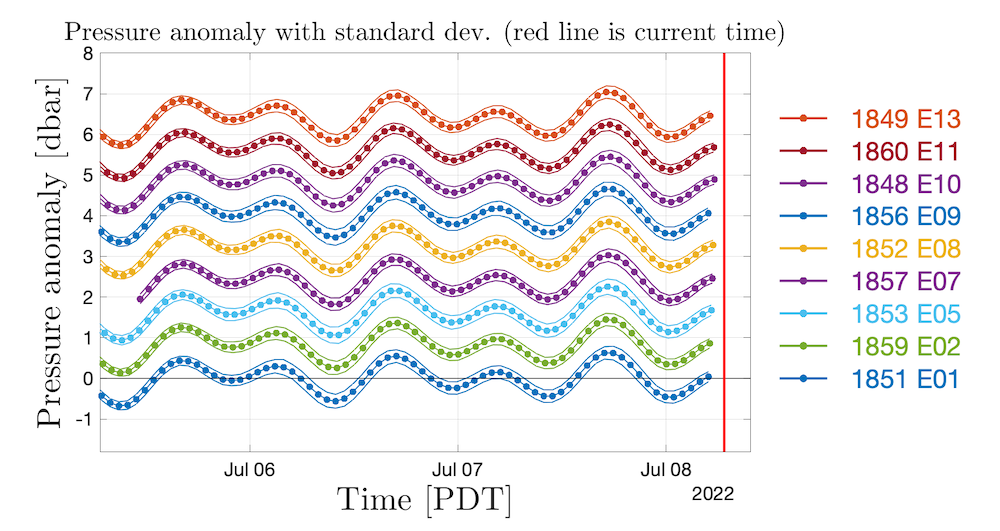
Figure 3